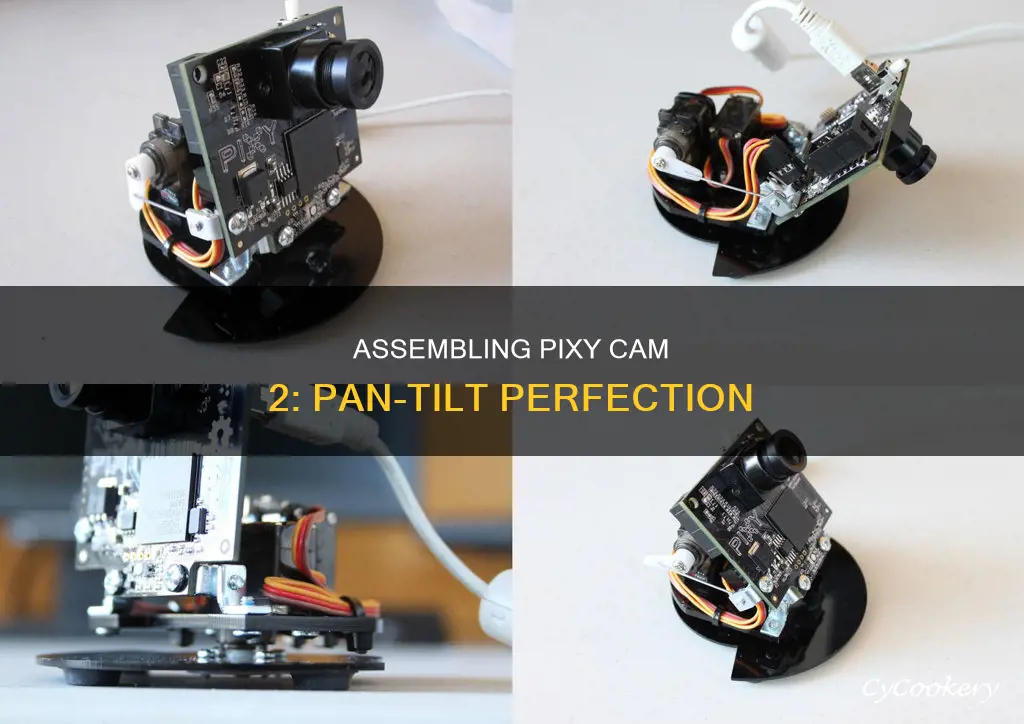
The Pixy2 is a small camera that can track coloured objects and, with the help of its pan/tilt kit, can physically move to aim itself. The pan/tilt kit is a dual-axis robotic camera mount that can be assembled with PixyCam 2 to enable it to follow coloured objects. The kit includes two servos for the pan and tilt axes, a base, and mounting hardware and cable ties. The assembly instructions are available online and are generally regarded as easy to follow.
| Characteristics | Values |
|---|---|
| Assembly | The Pixy Cam 2 with Pan Tilt kit is easy to assemble, with clear instructions and pictures. |
| Compatibility | Works with Arduino, Raspberry Pi, BeagleBone Black, and other dev boards that communicate via SPI, I2C, UART, or USB. |
| Features | Object tracking, line-following capabilities, LED headlights, and pan/tilt functionality. |
| Power | Powered via USB port; no batteries required. |
| Adjustments | Tracking speed can be modified by adjusting the panLoop and tiltLoop PID numbers. |
| Cable Management | Cable ties are used to secure wires, ensuring enough slack for full tilt motion without overtightening. |
| Mounting Options | The servo horn can be mounted centered or off-centered depending on the application (desktop vs robot). |
| Accessories | Includes mounting hardware, cable ties, servo horns, fasteners, and a wire pushrod. |
| Limitations | Does not include facial recognition or part measurement features, and is not designed to control heavy machinery. |
Explore related products






What You'll Learn
![]()
Positioning the servo horn
Firstly, you need to decide on the position of the servo horn. The round servo horn can be lined up in two possible positions on the pan-tilt base. If you plan to use the pan-tilt mechanism on a desktop, centring the servo horn may be preferable. This provides a stable platform for the camera to operate. On the other hand, if you intend to mount the pan-tilt mechanism on a robot, you may prefer an off-centre position. This allows the Pixy2 to effectively look over the edge of the base and track objects more easily.
Once you've decided on the position, it's time to secure the servo horn in place. Use a short tapping fastener to mount the round servo horn to the pan-tilt base. Be sure to use the correct fastener; the long tapping fastener will prevent the pan servo from rotating, so ensure you select the short one. This will keep the servo horn in place while allowing the necessary rotation for the pan-tilt mechanism to function correctly.
Next, attach the tilt and pan servo horns using the servo horn fasteners provided in the servo baggies. These fasteners are specifically designed to secure the servo horns in place, ensuring smooth and accurate movement for the pan and tilt functions. Make sure you follow the instructions provided with your kit to identify the correct fasteners and avoid any confusion.
Finally, you'll want to attach the stand-offs to the pan-tilt base. These provide stability and ensure the servo horns can operate effectively. Use four nylon stand-offs and four 2-56 fasteners to secure them in place, following the instructions and diagrams provided with your kit. This step will vary depending on the specific kit you have, so refer to your kit's instructions to ensure accurate assembly.
By following these steps, you'll have successfully positioned and secured the servo horn for your Pixy Cam 2 with pan and tilt functionality. Remember to refer to the assembly instructions specific to your kit, as there may be slight variations in the assembly process depending on the manufacturer and model.
To Brown or Not to Brown: Unraveling the Mystery of Crock-Pot Sausage
You may want to see also
Explore related products






![]()
Connecting the servo wires
When connecting the servo wires, you will need to plug the servo wires into Pixy's servo connector. Looking at the back of the Pixy2, the pan servo should be on the left side of the connector, and the tilt servo should be on the right side. Use cable ties to hold down the cables, ensuring there is enough cable slack for Pixy to tilt fully before bringing the cable ties snug. It is important not to overtighten the cable ties, as this may damage the wires. Use wire cutters to remove the ends of the cable ties.
The servo wires are used to connect the Pixy2 camera to the pan-tilt mechanism, allowing the camera to physically move and aim itself by controlling the servos. The pan-tilt mechanism has two servos: one for the pan axis and one for the tilt axis. These servos allow the camera to rotate horizontally and vertically, respectively.
When connecting the servo wires, it is important to ensure that the correct wires are connected to the correct servo connectors. The servo connectors are typically colour-coded, with the pan servo connector being one colour and the tilt servo connector being another colour. The servo wires themselves may also be colour-coded to match the servo connectors.
In addition to the servo wires, the pan-tilt mechanism will also require power and signal wires to be connected to the Pixy2 camera. These wires will provide power to the servos and allow the camera to control the movement of the servos. The power and signal wires are typically connected to a separate connector on the Pixy2 camera, which is usually located near the servo connector.
It is important to follow the assembly instructions carefully when connecting the servo wires and other components. The instructions will provide specific details on which wires to connect and how to secure them properly. As noted by some users, the instructions may be lengthy, but it is important to refer to them carefully to ensure proper assembly.
Tin Pan Alley's Legacy in Modern Music
You may want to see also
Explore related products





![]()
Securing cables with cable ties
Once you've plugged the servo wires into Pixy2's servo connector, with the pan servo on the left and the tilt servo on the right, it's time to secure the cables with cable ties. This process will help keep the cables organised and in place while you work with the Pixy Cam 2 pan-tilt mechanism. Here's a detailed guide on how to do it:
First, take a cable tie and use it to hold down the cables. The cable ties should be snug, but not too tight, as overtightening can damage the wires. Make sure there is enough cable slack for Pixy to tilt fully before tightening the cable ties.
Next, use wire cutters to remove the excess ends of the cable ties. This will give your project a neater appearance and prevent any loose ends from getting in the way.
Now, grab a short 4-40 fastener, the wire pushrod, and the remaining 2-threaded bracket. Attach the pushrod to the bracket, ensuring that the longer leg of the bracket receives the fastener. Pay attention to the orientation of the pushrod to avoid accidentally flipping it.
Finally, avoid tightening the fastener on the pushrod. This step is crucial to ensure the proper functioning of the mechanism.
By following these steps, you'll be able to securely hold the cables in place and continue with the assembly process for your Pixy Cam 2 with pan-tilt functionality.
Cleaning Green Pan: Removing Stubborn Carbon Burns
You may want to see also
![]()
Attaching the pushrod
Firstly, gather the necessary components: a short 4-40 fastener, the wire pushrod, and the remaining 2-threaded bracket. It is important to pay attention to the orientation of the pushrod to ensure it is not accidentally flipped during assembly.
Next, attach the pushrod to the bracket. This is done by inserting the long leg of the bracket into the fastener, ensuring a secure connection. Make sure not to tighten the fastener on the pushrod just yet, as adjustments may be needed later on.
The pushrod assembly should now be attached to the pan-tilt mechanism. This will involve carefully positioning the assembly in the correct orientation and securing it in place. Refer to the assembly instructions and diagrams provided by the manufacturer to ensure the pushrod is attached correctly.
Once the pushrod is in place, you can proceed with the next steps of assembling the Pixy Cam 2 with the pan-tilt mechanism. This may include making any necessary adjustments to the pushrod assembly to ensure smooth and accurate movement.
The pushrod plays a vital role in the pan-tilt mechanism, enabling the camera to tilt and adjust its viewing angle. By following these instructions, you can ensure that the pushrod is securely and correctly attached, allowing for optimal performance of your Pixy Cam 2.
Instant Pot Pan Size Guide
You may want to see also
![]()
Adjusting the tracking speed
The panLoop and tiltLoop are responsible for updating the position of the servos based on the error between the current position and the desired position. The error is calculated as the difference between the current position and the centre position. For example, the panError is calculated as the difference between the X_CENTER and the x-position of the tracked block (panError = X_CENTER - pixy.blocks [trackedBlock].x). The tiltError is calculated similarly, but for the y-axis (tiltError = Y_CENTER - pixy.blocks [trackedBlock].y).
By adjusting the PID (Proportional, Integral, Derivative) numbers, you can control how quickly the camera adjusts its position. The proportional term determines how much the servo adjusts its position based on the current error. A larger proportional value will result in faster movement but may be less stable. The integral term considers the cumulative error over time, helping to reduce any remaining steady-state error. The derivative term looks at the rate of change of the error, which can improve stability but may slow down the response.
When adjusting the PID numbers, it's important to consider the trade-off between speed and stability. A higher proportional value may increase the speed of tracking, but it can also make the system more susceptible to overshooting and oscillations. On the other hand, a higher derivative value can improve stability but may slow down the response time. Fine-tuning these values will allow you to find the optimal balance between speed and stability for your specific use case.
Mastering Real-time Mouse Pan in AutoCAD
You may want to see also
Frequently asked questions
The Pan-Tilt2 Servo Motor Kit for Pixy2 is a dual-axis robotic camera mount that allows Pixy2 to physically move to aim itself and track coloured objects.
The kit includes two durable laser-cut plastic pieces for the base, two servos for the pan and tilt axes, and all the mounting hardware and cable ties needed to assemble.
The assembly instructions for the Pixy Cam 2 with Pan Tilt can be found on the manufacturer's website or wiki page.
The assembly process requires some basic tools such as wire cutters, nail clippers, and screwdrivers.



















